ラズパイPicoW(Raspberry Pi Pico W)に超音波距離センサ(US-100)と液晶ディスプレイ(LCD)を接続し、UART通信を使ってLCDに超音波距離センサで測定した距離を表示させます。
実験準備
実験に必要な環境や部品を準備します。
機器とプログラム
「I2C通信で液晶ディスプレイ(LCD)に文字表示。」の回路に超音波距離センサ(US-100)を追加し、プログラムを改造して実験します。
使う部品
超音波距離センサ(US-100)及び液晶ディスプレイ(LCD)、I2CシリアルI/Fモジュールなど実験に使う部品を準備します。(「I2C通信で液晶ディスプレイ(LCD)に文字表示。」と一部、重複しています。)
| 部 品 名 | 規 格 | 数 量 | 取扱い店(参考) |
| 超音波距離センサ (GPIO) | US-100 | 1 | スイッチサイエンス |
| 液晶ディスプレイ(LCD) | LCD 1602A | 1 | Amazon (セット) |
| I2CシリアルI/Fモジュール | LCM1602 | ||
| ブレッドボード | BB-102 | 1 | 秋月電子通商 |
| ジャンパーワイヤ | オス-メス (約20cm) | 1 | 電子工作ステーション |
| ジャンパーワイヤ | オス-オス (約20cm) | 1 | 電子工作ステーション |
US-100はジャンパを配置してUARTモードで使います。仕様等はスイッチサイエンスさんのホームページを参照してください。
配線
準備した機器と部品をつなぎ、MicroPythonでプログラミングを行って、超音波距離センサで測定した距離を、液晶ディスプレイ(LCD)に表示させます。
配線リスト
超音波距離センサ(US-100)は、UART通信のチャンネルにジャンパーワイヤで接続し、液晶ディスプレイ(LCD)は、I2C通信のチャンネルにジャンパーワイヤで接続します。
液晶ディスプレイ(LCD)は5Vで動作しますので、VBUS (5V)に接続し、超音波距離センサ(US-100)は仕様上、5Vでも動作しますが、今回は3.3Vの3V3に接続します。
▶️超音波距離センサ(US-100)の配線
| ラズパイPicoW | 超音波距離センサ(US-100) | 備 考 |
| GP0 | Trig/Tx | |
| GP1 | Echo/Rx | |
| 3V3 (3.3V) | VCC | |
| GND | GND | |
| GND | GND |
▶️液晶ディスプレイ(LCD)の配線
| ラズパイPicoW | 液晶ディスプレイ(LCD) | 備 考 |
| GP16 | SDA | |
| GP17 | SCL | |
| VBUS (5V) | VCC | |
| GND | GND |
配線図
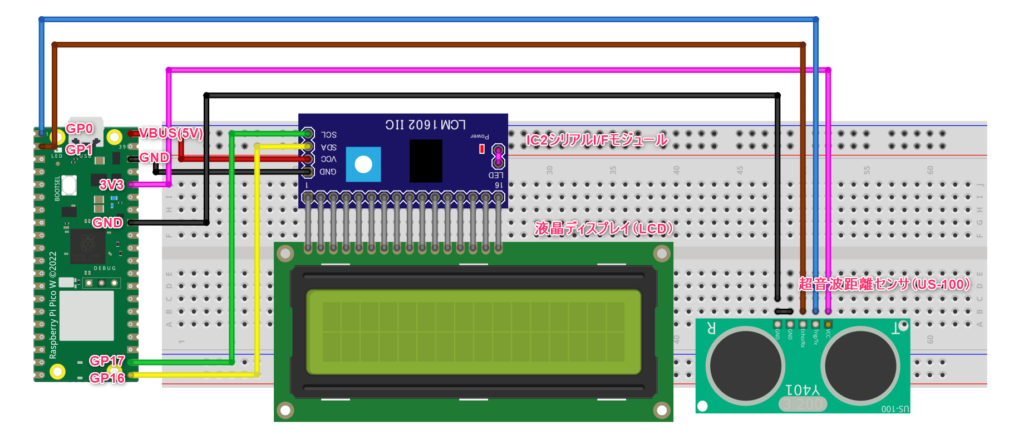
液晶ディスプレイ(LCD)とI2CシリアルI/Fモジュールは、ブレッドボード内部の配線で接続します。
距離測定プログラムの実行
超音波距離センサ(US-100)は、2cm~450cm(20mm~4500mm)の測定範囲の距離を16ビットのディジタルデータに変換し、9600ボーUART通信を通して、ラズパイPicoWなどのコンピュータに提供します。
ラズパイPicoWは読み込んだディジタルデータを処理し、距離をミリメータで液晶ディスプレイ(LCD)に表示します。
Raspi4BのThonnyを起動し、次のコードを「エディタ」に入力するか、リストをコピーしてペーストします。
##################################################
#
# モジュールの読み込み
#
##################################################
#UART/I2C
from machine import UART, Pin, I2C
import utime
#LCD
from pico_i2c_lcd import I2cLcd
##################################################
#
# US-100接続 UARTの設定
#
##################################################
#UART接続パラメータ
UART_CH = 0
#UARTオブジェクト作成
uart0 = UART(UART_CH, baudrate=9600, tx=Pin(0), rx=Pin(1))
#作成待ち
utime.sleep_ms(100)
#データ受信用バッファ設定(2バイト)
buf = bytearray(2)
#US-100 応答待ち時間初期化
wttm = 0
##################################################
#
# 液晶ディスプレイ(LCD)初期設定
#
##################################################
#I2Cを利用するため、オブジェクト(i2c)を作成
i2c = I2C(0,sda=Pin(16), scl=Pin(17), freq=400000)
#LCDのパラメータを設定
ADR = 0x27
ROW = 2
COL = 16
#LCDを利用するため、オブジェクト(lcd)を作成
lcd = I2cLcd(i2c, ADR, ROW, COL)
##################################################
#
# 【関数】距離測定
#
##################################################
def dstn_msurmnt():
#データ受信用バッファ クリア
buf[0] = 0
buf[1] = 0
#US-100へ距離測定の開始要求
uart0.write(b'\x55')
#US-100 応答待ち時間 ミリ秒カウンタ開始
wttm = utime.ticks_ms()
#受信データの有無を確認
while uart0.any() == 0:
if utime.ticks_diff(utime.ticks_ms(), wttm) > 100:
#100ms超えても受信データが無い場合はエラー
try:
raise
except:
#LCD消灯
lcd.clear
#LCDにエラー表示
lcd_disp("Reading Timeout", "from US-100!")
#ラズパイPicoWリセット
machine.reset()
#100us処理待ち
utime.sleep_us(100)
#US-100からbufに2バイト読み込み
uart0.readinto(buf, 2)
#HighByte(左に8ビットシフト)をLowByteと連結
return((buf[0] << 8) | buf[1])
##################################################
#
# 【関数】LCDに文字表示
#
##################################################
def lcd_disp(msg1, msg2):
#LCDに文字を表示
lcd.move_to(0, 0)
lcd.putstr(msg1)
lcd.move_to(0, 1)
lcd.putstr(msg2)
##################################################
#
# メイン
#
##################################################
try:
while True:
#距離測定
dstn = dstn_msurmnt()
#文字整形
frmt_dctn = "Distance: " + "{:03d}".format(dstn) + " mm"
#LCDに文字表示
lcd_disp(frmt_dctn, "")
#50ミリ秒ごとに測定
utime.sleep_ms(50)
except KeyboardInterrupt:
# Turn off the display
print("「Ctrl + c」キーが押されました。")
#LCD消灯
lcd.backlight_off()
lcd.display_off()
#ラズパイPicoWリセット
machine.reset()
Thonnyの「F5」キーを押して、距離測定プログラムを実行すると、対象物との距離が測定され、結果が液晶ディスプレイ(LCD)に表示されます。
確認後、Thonnyの「Ctrl + c」キーを押すと、液晶ディスプレイ(LCD)が消灯し、処理が中断しますので、中断後、「Ctrl + F2」キーを押して、プログラムを終了させます。
任意のファイル名でラズパイPicoWに保存します。(ここでは「3_10uartdstnc.py」で保存しました。)
距離測定プログラムの仕組み
対象物との距離を測定し、液晶ディスプレイ(LCD)に、距離(ミリメータ)を表示するまでのプログラムの動きを簡単に見ていきます。
【関数】は決められた処理を実行し、その結果を返す命令で、メインや他の関数から呼び出され、利用されます。
モジュールの読み込み
液晶ディスプレイ(LCD)との接続、超音波距離センサ(US-100)との接続するためのモジュールを読み込み(インポート)ます。
#UART/I2C
from machine import UART, Pin, I2C
import utime
#LCD
from pico_i2c_lcd import I2cLcdUS-100接続 UARTの設定
GPピン0と1を通して、超音波距離センサ(US-100)と、9600ボーでUART通信を行うためのオブジェクトを作成ます。
#UART接続パラメータ
UART_CH = 0
#UARTオブジェクト作成
uart0 = UART(UART_CH, baudrate=9600, tx=Pin(0), rx=Pin(1))
#作成待ち
utime.sleep_ms(100)
#データ受信用バッファ設定(2バイト)
buf = bytearray(2)
#US-100 応答待ち時間初期化
wttm = 0
液晶ディスプレイ(LCD)初期設定
I2C通信を使って液晶ディスプレイ(LCD)を利用するため、I2C通信用のオブジェクト、LCD表示用のオブジェクトを作成します。
#I2Cを利用するため、オブジェクト(i2c)を作成
i2c = I2C(0,sda=Pin(16), scl=Pin(17), freq=400000)
#LCDのパラメータを設定
ADR = 0x27
ROW = 2
COL = 16
#LCDを利用するため、オブジェクト(lcd)を作成
lcd = I2cLcd(i2c, ADR, ROW, COL)【関数】距離測定
UARTのオブジェクトを使って、US-100へ距離測定の開始要求メッセージを送り、応答を待ちます。
応答が既定の時間内に返らない場合は、エラーメッセージを液晶ディスプレイ(LCD)に表示し、ラズパイPicoWをリセットします。
応答があった場合は、2バイト分の距離データを読み取り、連結して16ビットのデータとして処理を行い、呼び出し元に結果を返します。
def dstn_msurmnt():
#データ受信用バッファ クリア
buf[0] = 0
buf[1] = 0
#US-100へ距離測定の開始要求
uart0.write(b'\x55')
#US-100 応答待ち時間 ミリ秒カウンタ開始
wttm = utime.ticks_ms()
#受信データの有無を確認
while uart0.any() == 0:
if utime.ticks_diff(utime.ticks_ms(), wttm) > 100:
#100ms超えても受信データが無い場合はエラー
try:
raise
except:
#LCD消灯
lcd.clear
#LCDにエラー表示
lcd_disp("Reading Timeout", "from US-100!")
#ラズパイPicoWリセット
machine.reset()
#100us処理待ち
utime.sleep_us(100)
#US-100からbufに2バイト読み込み
uart0.readinto(buf, 2)
#HighByte(左に8ビットシフト)をLowByteと連結
return((buf[0] << 8) | buf[1])【関数】LCDに文字表示
2つのメッセ―ジを引数として受け取り、それぞれ、液晶ディスプレイ(LCD)の上段と下段に表示します。
def lcd_disp(msg1, msg2):
#LCDに文字を表示
lcd.move_to(0, 0)
lcd.putstr(msg1)
lcd.move_to(0, 1)
lcd.putstr(msg2)メイン
50ミリ秒ごとに【関数】距離測定を呼出し、取得した距離データを整形後、液晶ディスプレイ(LCD)に表示します。
「Ctrl + c」キーを押すと、液晶ディスプレイ(LCD)が消灯し、ラズパイPicoWをリセットします。
try:
while True:
#距離測定
dstn = dstn_msurmnt()
#文字整形
frmt_dctn = "Distance: " + "{:03d}".format(dstn) + " mm"
#LCDに文字表示
lcd_disp(frmt_dctn, "")
#50ミリ秒ごとに測定
utime.sleep_ms(50)
except KeyboardInterrupt:
# Turn off the display
print("「Ctrl + c」キーが押されました。")
#LCD消灯
lcd.backlight_off()
lcd.display_off()
#ラズパイPicoWリセット
machine.reset() まとめ
ラズパイPicoW(Raspberry Pi Pico W)に超音波距離センサ(US-100)と液晶ディスプレイ(LCD)を接続し、UART通信を使ってLCDに超音波距離センサで測定した距離を表示させました。
UART通信の基本、ラズパイPicoW(Raspberry Pi Pico W)を使った接続方法を学びました。
超音波距離センサ(US-100)から、UART通信を使った距離データの取得方法を学びました。