「マイクロサーボを0°と90°の間で往復させてみよう。」では、シールド経由でmicro:bitに接続したマイクロサーボに、付属のサーボホーンを取り付けて、サーボホーンが0°と90°の間で往復するプログラムをMakeCodeを使って作成します。
はじめに
「micro:bitとキットでマイコン制御」では、micro:bit V2(以下 micro:bit)と市販のセンサーキットの「KEYESTUDIO 37センサースターターキット micro:bit V2付」(以下 キット)を使ってマイコン制御の基本を実習します。

実習はkeyestudio.comが投稿しているwiki(KS0361(KS0365) keyestudio 37 in 1 Starter Kit for BBC micro:bit)を二次利用して行います。
ライセンス
図やソースコード(ブロック)等、すべての内容はCC BY-SA 4.0ライセンスに従います。
実習準備
実習に必要な機器とキットの部品を準備します。
機器
「micro:bitとキットでマイコン制御:micro:bitをMakeCodeで使ってみよう。」記事で書きましたmicro:bitと、MakeCodeをインストールしたWindows11搭載のパソコンを準備します。

部品
マイクロサーボを、Micro bit Sensor Shield V2(以下 シールド)にワイヤーで接続して使います。
▶️マイクロサーボ
マイクロサーボは、GND(茶色の線)と電源(赤色の線)間に5Vの電源を接続し、信号端子(オレンジ色の線)にPWM 信号を加えると、0°~180°の間で往復します。
サーボの回転角度は、PWM(Pulse-Width Modulation)信号のデューティサイクルを調整することで制御します。
PWM信号の標準周期は20msに固定されており、0.5ms~2.4msの間でパルス幅を調整して、0°~180°の回転角度を制御します。

▶️ジャンパーワイヤー(メスーメス) 20cm
40本が一束になっていますので、接続する本数だけ分けて使います。

配線
配線のためのジャンパーワイヤーは、必要な本数を分けてください。
配線するときは、micro;bitのUSBケーブルを取り外して行ってください。
配線図
マイクロサーボとシールドをジャンパーワイヤーで接続します。
配線図は個別にピンを接続してますが、実際は、付属している3ピンのコネクタで接続します。
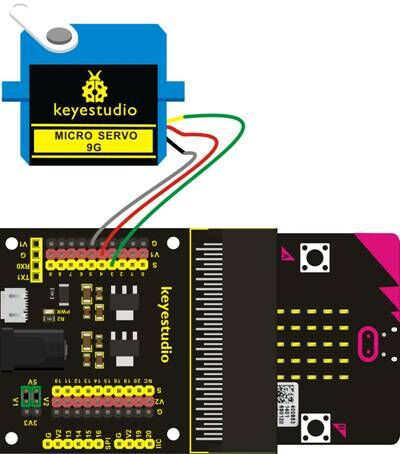
配線リスト
| マイクロサーボ | シールド | 備 考 |
| 茶色の線 | G-3ピン | |
| 赤色の線 | V1-3ピン | |
| オレンジ色の線 | S-3ピン |
外付けバッテリー
キットに付属されている、バッテリーケース(Premium Battery Case 6-cell AA)に単三電池を6本装着して、シールドに接続し5Vの電圧を供給します。
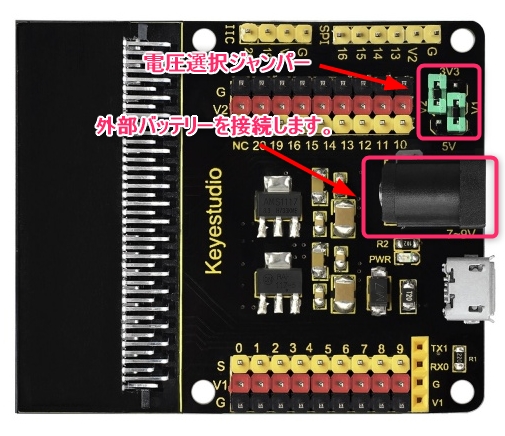

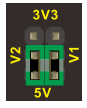
シールドの電圧選択ジャンパーで、供給電圧を5Vに設定します。
プロジェクト
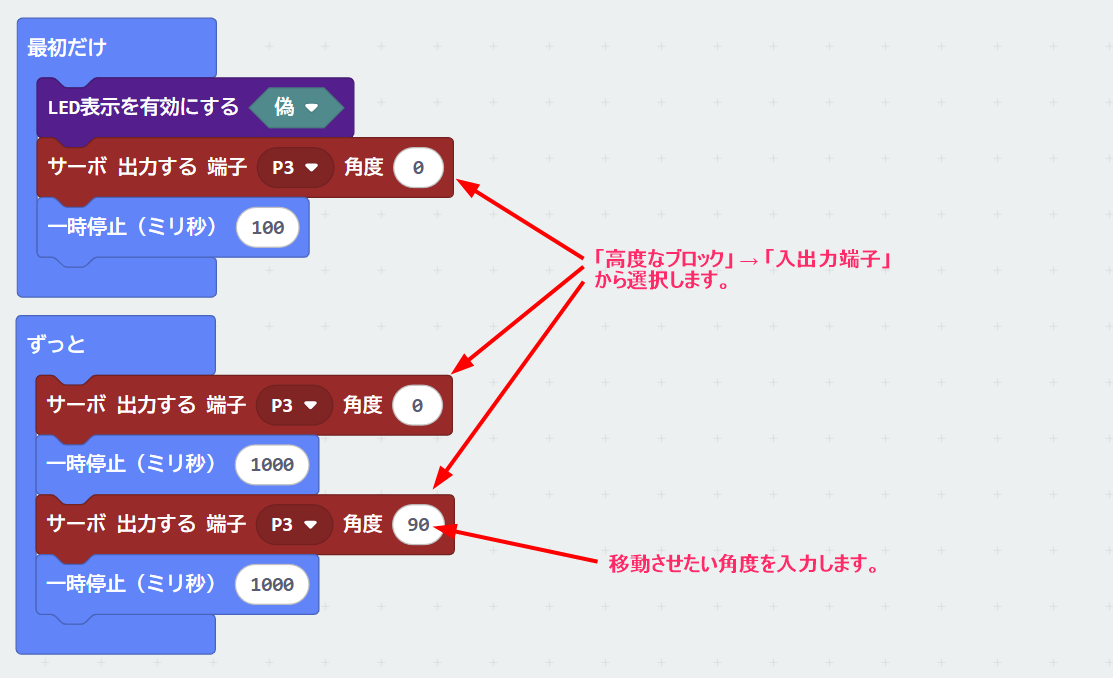
「マイクロサーボを0°と90°の間で往復させてみよう。」は、シールド経由でmicro:bitに接続したマイクロサーボに、付属のサーボホーンを取り付けて、サーボホーンが0°と90°の間で往復させるプロジェクトです。
プロジェクトの作成
配線したmicro:bitにUSBケーブルを取り付け、MakeCodeを起動します。
「新しいプロジェクト」をクリックして、プロジェクト(mb038-MicroServo)を作成します。
プロジェクトはダウンロードしたKEYESTUDIO 37のマニュアルの「2.Makecode Tutorial - Makecode - Project 48_Micro Servo」を参考にしています。
プロジェクトの作成手順やブロックの配置方法については、こちらを参考にしてください。
プロジェクトをmicro:bitへ転送
作成したプロジェクトをmicro:bitに転送して、実行できるようにします。
転送方法はこちらを参考にしてください。
コピーが完了するとプログラムが起動し、マイクロサーボに取り付けた、付属のサーボホーンが0°と90°の間で往復します。
まとめ
シールドに接続したマイクロサーボに、付属のサーボホーンを取り付けて、サーボホーンが0°と90°の間で往復させるプロジェクトをMakeCodeで作成しました。