「赤外線障害物検知センサーで障害物を検知してみよう。」では、シールド経由でmicro:bitに接続した赤外線障害物検知センサーに障害物を近づけると、 LEDマトリックスに0または1が表示されるプログラムを、MakeCodeを使って作成します。
はじめに
「micro:bitとキットでマイコン制御」では、micro:bit V2(以下 micro:bit)と市販のセンサーキットの「KEYESTUDIO 37センサースターターキット micro:bit V2付」(以下 キット)を使ってマイコン制御の基本を実習します。

実習はkeyestudio.comが投稿しているwiki(KS0361(KS0365) keyestudio 37 in 1 Starter Kit for BBC micro:bit)を二次利用して行います。
ライセンス
図やソースコード(ブロック)等、すべての内容はCC BY-SA 4.0ライセンスに従います。
実習準備
実習に必要な機器とキットの部品を準備します。
機器
「micro:bitとキットでマイコン制御:micro:bitをMakeCodeで使ってみよう。」記事で書きましたmicro:bitと、MakeCodeをインストールしたWindows11搭載のパソコンを準備します。

部品
赤外線障害物検知センサーを、Micro bit Sensor Shield V2(以下 シールド)にワイヤーで接続して使います。
▶️赤外線障害物検知センサー
赤外線障害物検知センサーは、実際には距離調整可能な障害物回避センサーで、赤外線送信部と赤外線受信部で構成されています。
送信部から放射された赤外線が障害物にぶつかると赤外線が反射し、受信部がそれを受信すると、センサーの信号端子はLowレベルを出力します。
障害物を検知していない場合は、放射された赤外線は移動距離によって弱まり、やがて消滅するため、受信部は受信できず、センサーの信号端子はHighレベルを出力します。
注:モジュール上のポテンショメータにより、検出距離を調整することができ、有効距離は2~40cmです。

▶️ジャンパーワイヤー(メスーメス) 20cm
40本が一束になっていますので、接続する本数だけ分けて使います。

配線
配線のためのジャンパーワイヤーは、必要な本数を分けてください。
配線するときは、micro;bitのUSBケーブルを取り外して行ってください。
配線図
赤外線障害物検知センサーとシールドをジャンパーワイヤーで接続します。
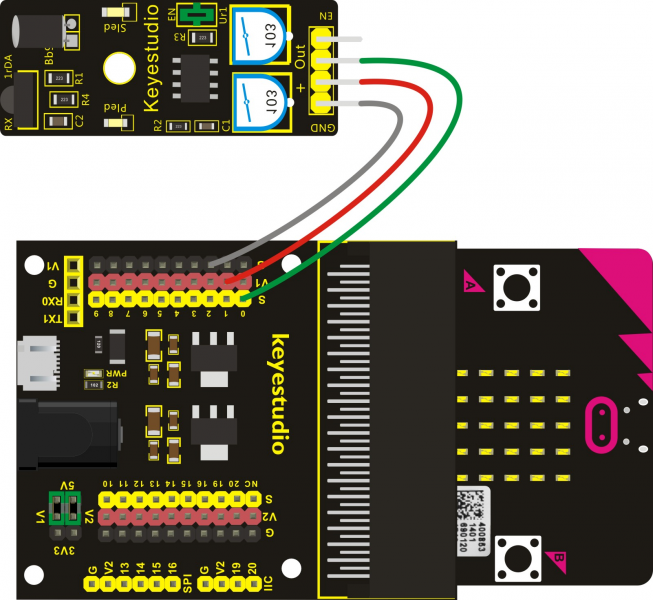
配線リスト
| 赤外線障害物検知センサー | シールド | 備 考 |
| GまたはGNDピン | G-2ピン | |
| Vまたは+ピン | V1-1ピン | |
| SまたはOUTピン | S-0ピン |
外付けバッテリー
赤外線障害物検知センサーの動作電圧は3.3V~5Vの電源供給が必要なため、マイクロビットから供給される3Vでは正常に動作しません。
キットに付属されている、バッテリーケース(Premium Battery Case 6-cell AA)に単三電池を6本装着して、シールドに接続し5Vの電圧を反射型フォトセンサーに供給します。
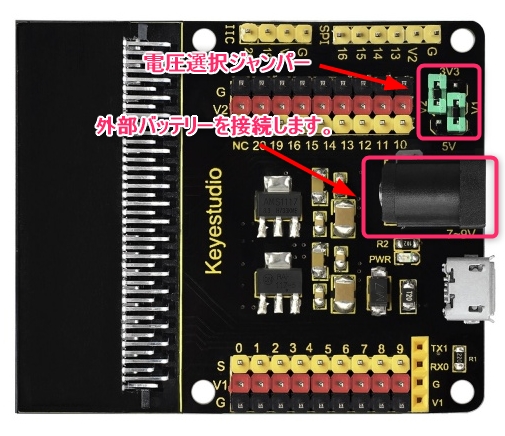

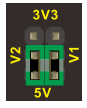
シールドの電圧選択ジャンパーで、供給電圧を5Vに設定します。
プロジェクト
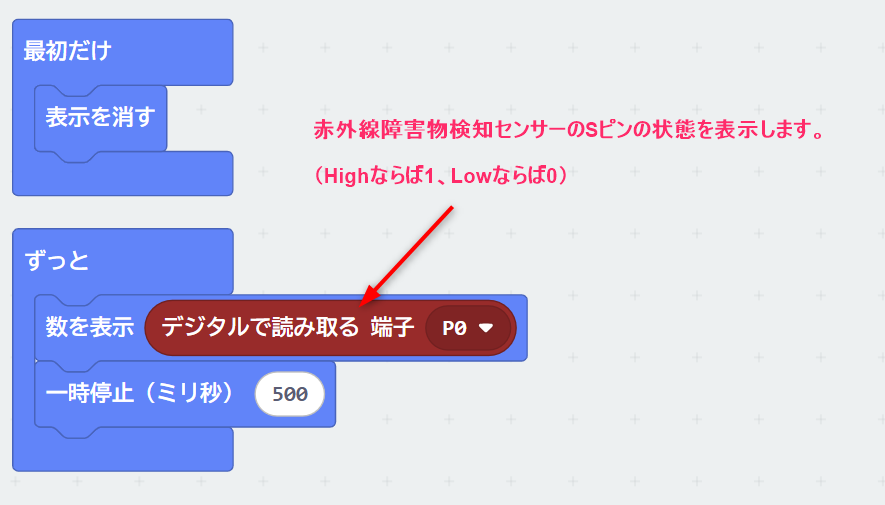
「赤外線障害物検知センサーで障害物を検知してみよう。」は、シールドに接続した赤外線障害物検知センサーに障害物を近づけ、検知すると LEDマトリックスに0、検知しなければ1が表示されるプロジェクトです。
プロジェクトの作成
配線したmicro:bitにUSBケーブルを取り付け、MakeCodeを起動します。
「新しいプロジェクト」をクリックして、プロジェクト(mb015-ObstacleAvoidance)を作成します。
プロジェクトはダウンロードしたKEYESTUDIO 37のマニュアルの「2.Makecode Tutorial - Makecode -Project 26_Obstacle Avoidance」を参考にしています。
プロジェクトの作成手順やブロックの配置方法については、こちらを参考にしてください。
プロジェクトをmicro:bitへ転送
作成したプロジェクトをmicro:bitに転送して、実行できるようにします。
転送方法はこちらを参考にしてください。
コピーが完了すると、プログラムが起動し、赤外線障害物検知センサーに障害物を近づけ、検知すると LEDマトリックスに0、検知しなければ1が表示されます。
まとめ
シールドに接続した赤外線障害物検知センサーに障害物を近づけ、検知すると LEDマトリックスに0、検知しなければ1が表示されるプロジェクトをMakeCodeで作成しました。